What Is a Humanoid Robot?
A humanoid robot is a machine designed to replicate the structure of the human body, typically a head, torso, arms, and legs, though many systems include only the upper body. The human-like design isn’t purely aesthetic. It’s functional.
Most real-world environments were built around human proportions, and humanoid robots can operate in those spaces without requiring costly infrastructure redesign.
Before examining the specific types of humanoid robots in detail, two examples anchor the broader conversation.
Atlas, developed by Boston Dynamics, represents the frontier of agile, full-body movement in bipedal systems.
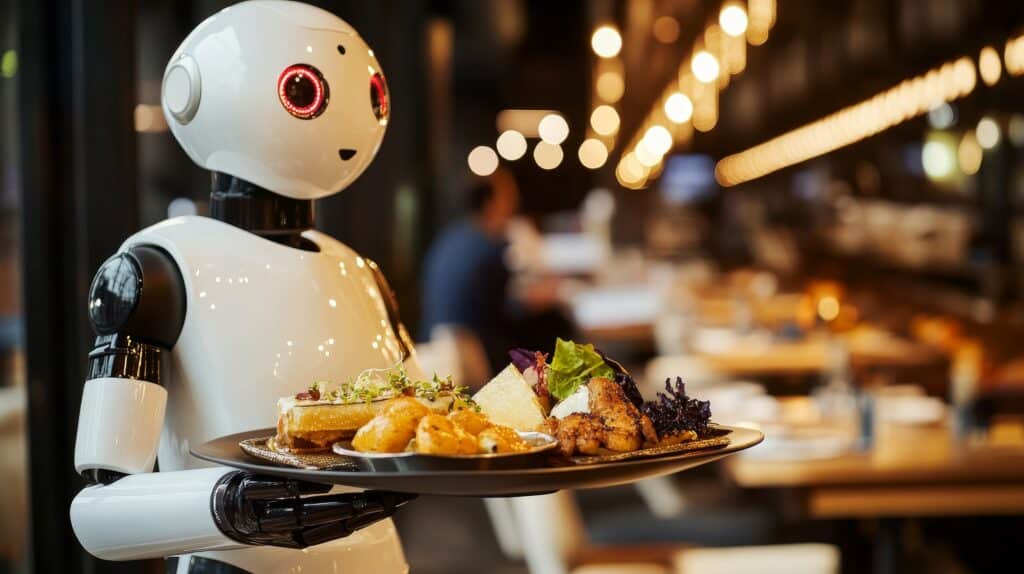
Pepper, created by SoftBank Robotics, shows how humanoid design translates into effective human-robot interaction in commercial environments.
They’re built for very different purposes, and that difference is exactly why classification matters for any serious business assessment of humanoid robotics.
How Humanoid Robots Are Classified
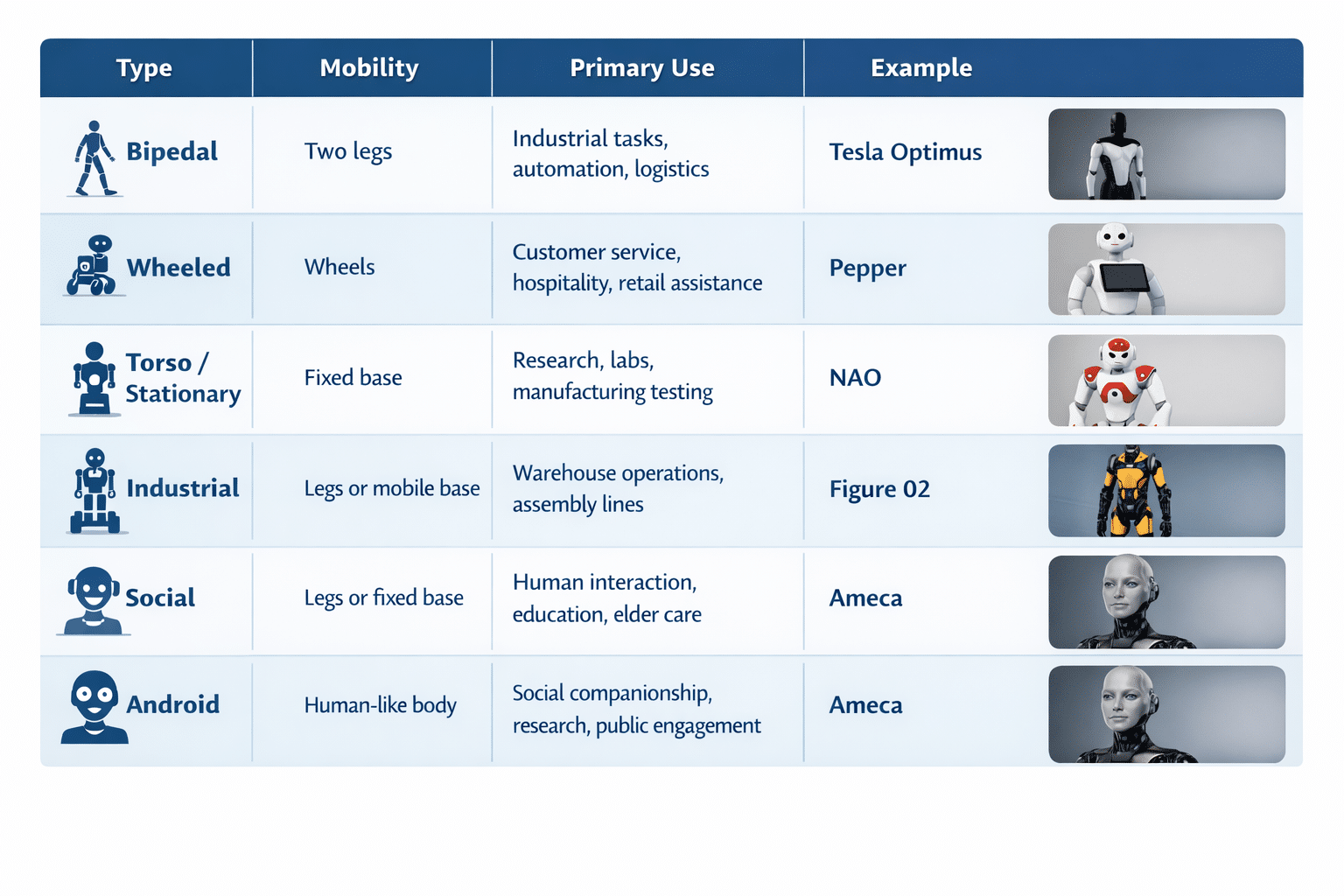
The types of humanoid robots are most usefully understood through two axes, physical structure and mobility on one side, and application domain and function on the other. A dual-axis framework gives business leaders a clearer map of where these machines are operating today and which categories are most directly relevant to their industries.
Classification by Structure and Mobility
Bipedal Humanoid Robots
Bipedal robots are two-legged machines capable of walking, climbing stairs, and maintaining balance in dynamic environments. Tesla Optimus, Figure 02, and the Unitree G1 represent the current generation pushing into active industrial deployment.
Their strategic value comes from an ability to operate in unmodified human workspaces, using balance algorithms, whole-body motion control, and advanced robot locomotion to navigate terrain that stops traditional automation cold.
For executives tracking industrial automation trends and warehouse robotics, bipedal humanoids are the closest available proxy for a flexible, drop-in workforce solution.